vss::feedback_control::RotatingLidar Struct Reference
Last update: 14.01.2025Parameters for a rotating lidar. More...
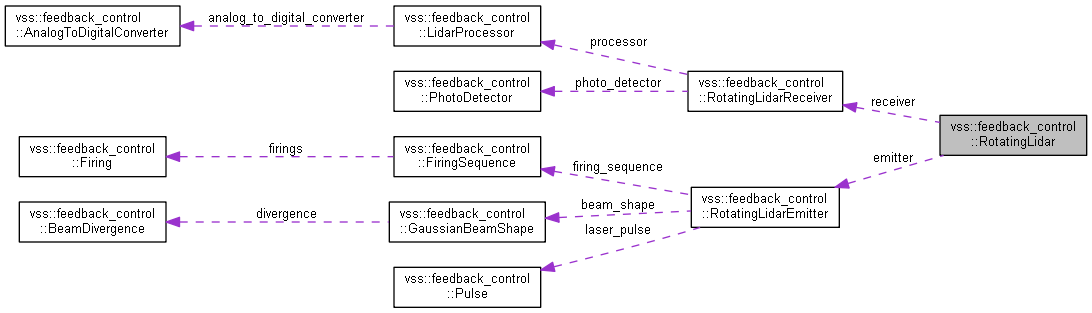
Collaboration diagram for vss::feedback_control::RotatingLidar:
Public Attributes | |
| google::protobuf::DoubleValue | rotation_speed = 1 |
| RotatingLidarEmitter | emitter = 2 |
| RotatingLidarReceiver | receiver = 3 |
Detailed Description
Parameters for a rotating lidar.
Member Data Documentation
◆ rotation_speed
| google::protobuf::DoubleValue vss::feedback_control::RotatingLidar::rotation_speed = 1 |
Rotation speed of the rotating lidar.
Unit: number of rotations per second.
◆ emitter
| RotatingLidarEmitter vss::feedback_control::RotatingLidar::emitter = 2 |
◆ receiver
| RotatingLidarReceiver vss::feedback_control::RotatingLidar::receiver = 3 |
The documentation for this struct was generated from the following file:
- feedback_control_lidar_parameters.proto
